York Robotics Laboratory

- York Robotics Laboratory
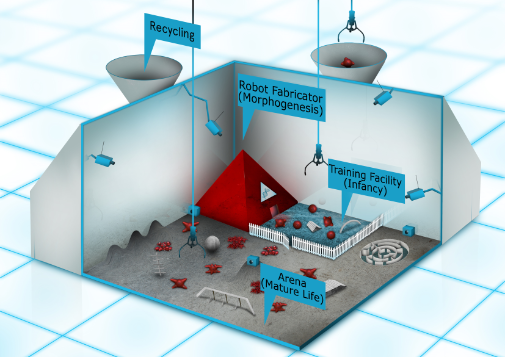
- Autonomous Robot Evolution: Cradle to Grave
- Autonomous (re)Production, Learning and Bio-inspired Robotics workshop






Autonomous (re)Production, Learning and Bio-inspired Robotics workshop
York, UK, 17-19th October 2022
Welcome
Autonomous (re)Production, Learning and Bio-inspired Robotics
Download the Final Programme
The Autonomous (re)Production, Learning and Bio-inspired Robotics workshop will be held in the historic city of York. The workshop aims to highlight and discuss emerging trends and future directions in the field of robotics, and will feature invited position papers from world-leading researchers across the field.
The technical programme will focus upon the potential for future developments within the field of evolutionary robotics, addressing areas such as:
- Novel methods for the simultaneous evolution of morphology and control
- Novel methods for facilitating learning and adaptation during the lifetime
- Evolution of learnability in a robot population
- Investigating the balance between morphological intelligence and brain intelligence
- Robot evolution in hardware
- Evolution of morphologies using novel materials
- Simulation of soft robots
- Closing the reality gap
- Evolving behavioural/morphological diversity within a robotic eco-system
- Issues related to manufacturability and viability of robotic genotypes Surrogate methods for fitness evaluations
Extended versions of the best submissions will be considered for a Special Issue of the Frontiers in Robotics and AI after a further refereeing process.
Attending the workshop
We welcome attendees from all areas of the evolutionary robotics community. Thanks to funding from the EPSRC, registration is free for a limited number of places. We also have a number of student bursaries available, which will contribute towards the travel and accommodation costs of registered students who are presenting at the workshop.
Getting to the Workshop
The workshop is being held in the Institute for Safe Autonomy Building, located on the University of York's new Heslington East campus.
To reach Heslington East by public transport, take bus lines 66 or 67, both of which run between the railway station and the University, and get off at the last stop. The journey takes approximately 15-20 minutes. More instructions to get to the building can be found here.
Invited Talks
Invited talks
The following speakers will be giving invited talks at the workshop. More to come...
Josh Bongard --- AI-designed organisms

Cyril Veinott Professor of Computer Science at the University of Vermont.
Abstract
Living systems exhibited intelligence for billions of years before nervous systems, a relatively recent evolutionary innovation, arose. Aneural intelligence is most obvious in individual cells, which exhibit breathtaking abilities to reorganize in the face of massive perturbations. Our team recently introduced a methodology that exploits this cellular intelligence to create completely new kinds of organisms: the xenobots. An AI is tasked with searching the space of all possible tissue rearrangements, seeking those that are stable and exhibit some desired function. In this talk I will describe organisms designed in this way to walk, swim, “see, remember, come back and tell”, and kinematically self replicate. I will conclude with the repercussions of this work for robotics, AI, synthetic biology, and embodied intelligence.
Barbara Webb --- Ant-inspired robots

Barbara Webb is Professor of Biorobotics at the School of Informatics at the University of Edinburgh
Abstract
Ants are highly capable in many behaviours relevant to robotics. Their navigational abilities have been the focus of behavioural and ethological study for many years, and a range of algorithmic models of their behaviour have been proposed, often tested in robot implementations. Our recent work has focussed on bridging the gap to understanding the neural circuits that underly capacitities such as visual orientation, path integration, and the combination of multiple cues. In each case there is an important interplay between exploiting critical sensory cues in the natural environment, and the efficient and robust computation that supports behavioural control. A new direction for this research is to investigate the manipulation capabilites of ants, which allow them to handle a wide diversity of arbitrary, unknown objects with a skill that goes well beyond current robotics.
Roderich Gross --- Distributed Autonomous Robotic Systems: Leveraging the Power of Collectives

Roderich Gross is an Associate Professor in the Department of Automatic Control and Systems Engineering at the University of Sheffield.
Abstract
Distributed autonomous robotic systems will play an important role in a range of application scenarios, from swarms of tiny robots transporting drugs within the human body, to modular solar panels that construct and repair themselves in space. In this talk, first, we show that even with robots of severely constrained information processing capabilities, systems can be designed to solve a number of canonical problems in robust and scalable ways. Second, we propose concepts and tools for the design of distributed robotic systems that can autonomously identify a suitable configuration to meet functional requirements, an important step towards resilience. The proposed solutions are formally analysed and/or experimentally validated with up to 600 real robots.
Emma Hart --- Towards the Autonomous Evolution of Robotic Ecosystems

Emma Hart, Professor of Natural Computation, Edinburgh Napier University
Abstract
How do you design a robot that has to operate in an environment that is unknown ..for example to clean up inside a nuclear reactor, explore a faraway asteroid or a trench deep under the ocean? Motivated by this question, the ARE project has focused on developing the foundations of both the science and technology that will allow robots to be designed, fabricated and evaluated autonomously. We propose a novel technology that combines evolutionary and learning approaches in a hybridised system that mixes virtual and physical populations of robots, exploiting the ability to rapidly explore the design space in simulation while minimizing the reality gap by evaluating in hardware. This talk will discuss some of the challenges that this brings in terms of engineering and evolutionary computation, and describe some of the solutions that we have developed over the last 4 years to solve these.
Gusz Eiben --- Towards the Evolution of Things: What Do We Know?

Vrije Universiteit Amsterdam & University of York, Professor of Computational Intelligence
Abstract
The Evolution of Things is a notion that refers to systems of tangible physical objects that undergo the Darwinian process of reproduction and selection. The talk will analyse this concept from historical, technological, scientific, and societal perspectives. It will highlight a number of landmark projects conducted over the last decades in this area and summarize what has been learned so far. An overview of what we do know will also tell what we do not know, thus giving indications on grand questions and key research directions in the (near) future. Last, but not least, ethical and safety aspects will be discussed driven by the potential danger of runaway evolution ‘in the wild’.
Sanaz Mostaghim --- Collective and Individual Autonomous Decision-Making in Time Critical Scenarios

Chair of Computational Intelligence, Otto von Guericke University Magdeburg, Germany
Abstract
This talk is about the recent advances in multi-objective decision-making techniques for autonomous systems. Decision-making is usually required when we are confronted with conflicting objectives and is in fact a very challenging task even for human decision-makers, since we first need to find all the possible optimal alternatives and then select the right choice using a decision policy. In this talk, we replace the human decision-maker with an autonomous system and provide novel methodologies for multi-criteria decision-making on a range of scenarios for autonomous systems during the mission. Enabling such systems to autonomously decide can contribute to their applicability in critical missions such as rescue robotics where the intervention of a human-controller is not always possible. The challenge is not only in finding and selecting the best alternative, but also in acting in a limited timeframe during the mission. One more focus of the talk is on the individual vs. collective decision-making algorithms. We will show that collective learning of a decision policy can help both the individual and the collective to act in an efficient way.
Andrew Philippides and Phil Husbands --- Exploiting embodied dynamics in evolutionary and bio-inspired robotics

Abstract
Alan Winfield - Can Evolutionary Robotics address questions in Evolutionary Biology?

Alan Winfield is a Professor of Robotics at Bristol Robotics Lab, UWE Bristol
Abstract
Evolutionary Algorithms (EA) are typically used to discover novel solutions to difficult design problems. Perhaps the most famous real-world example is an evolved satellite antenna design (Hornby et al, 2006). EA, and its application in robotics: Evolutionary Robotics (ER), is thus seen as a technique for search or optimisation. But evolutionary robotics also has the potential to allow us to explore questions in evolutionary biology. The idea of robots as scientific instruments is not new: Grey Walter’s robot tortoises ‘machina speculatrix’ were designed and built to demonstrate ideas in neuroscience (Holland, 2003). In recent years ER systems have been designed to illuminate aspects of evolutionary biology, including the co-evolution of predator-prey behaviour, brain-body co-evolution and the evolution of altruism (Floreano and Keller, 2010). In this talk I will explore both the potential and limitations of ER for addressing deep questions in evolutionary biology.
Venue
Institute for Safe Autonomy (ISA) Building

The workshop will be held in the Institute for Safe Autonomy (ISA) Building, located at the University of York's newly developed Heslington East campus. Instructions to get to the building can be found here.
York
The University of York is situated in one of the most beautiful cities in Europe (voted European Tourism City of the Year in 2007). Midway between the capital cities of London and Edinburgh, and with excellent transport links, the city has a 2000-year history, yet a modern outlook.
The city (then named Eboracum) was founded by the Romans. It has always been an important centre: it was one of the capitals of Roman Britain, and for a short period the entire Roman Empire was governed from York. In the ninth century CE, the city (then called Jorvik) was made the capital of most of northern England by the Vikings and remained so for most of the next eight hundred years.
Largely untouched by the industrial revolution, the centre of York today retains many period buildings, cobbled streets and pedestrian-only areas, lined with cafes and speciality shops. Tourism is now a major industry, and York is the second most-visited city in England (after London).
Travel

Travelling by Air
Manchester Airport is a large airport in the north of England and has a wide range of international flights and connections via London. Trains run directly to York from the airport station and take just under 2 hours. This is generally the most convenient option.
London Heathrow is the largest UK airport, with flights to a wide range of international destinations. Upon arrival, take the Heathrow Express train to Paddington station, then change to the Hammersmith and City underground line to reach King's Cross station (this takes about 30-45 minutes). Direct trains run frequently to York and take about 2 hours. London Gatwick, London Stansted and London Luton also have public transport connections to York.
Leeds-Bradford is the closest airport to York and has some international flights. Taxis to York take around 45 minutes. Other nearby airports with public transport connections include Newcastle, Durham Tees Valley and Humberside.
Travelling by Rail
From Europe — York can be reached in around 5 hours from Paris or Brussels by train, by taking the Eurostar from Paris Nord to London St Pancras, with a short transfer (5-minute walk) to London Kings Cross for direct rail service to York.
From the United Kingdom — York is on the East Coast main line from London to Edinburgh, just over two hours away from London King's Cross and around 2.5 hours from Edinburgh. There are also direct express services to many other major cities, including Manchester, Newcastle, Sheffield, Leeds, Birmingham and Glasgow.
Accommodation

Hotels and Bed and Breakfast
York has a wide selection of hotels and B&Bs. However, as a major tourist destination, it is recommended that you book accommodation early. Please note that the university is approximately 2 miles from the city centre and is served by a very regular bus service.
Novotel York Centre (***) lies on the bus route to the university and is also convenient for the city centre.
Park Inn by Radisson (***) is also near a bus stop and is located in the city centre.
The York tourist office provides an accommodation search facility.
Social

Monday 17th of October - The Star Inn The City
We have booked The Star Inn The City for drinks and dinner at 8 pm. The exact location can be found in this link.

Tuesday 18th of October - Shadows of York
An informative tour of York's grim history and ghostly past. The tour starts at 6.30 pm and we will meet outside the front of St Michael Le Belfry Church which is next to the Minster and Guy Fawkes Inn. The exact location can be found in this link.
Call for Submissions
Call for Submissions
We are currently soliciting abstracts from members of the community who are interested in presenting at this workshop. Abstracts should be no longer than three A4 pages and should focus on the potential for future developments within the field of bio-inspired robotics and autonomous design and manufacture. By way of example, they may address one or more of the following areas:
- Novel methods for the simultaneous evolution of morphology and control
- Novel methods for facilitating learning and adaptation during the lifetime
- Evolution of learnability in a robot population
- Investigating the balance between morphological intelligence and brain intelligence
- Robot evolution in hardware
- Evolution of morphologies using novel materials
- Simulation of soft robots
- Closing the reality gap
- Evolving behavioural/morphological diversity within a robotic eco-system
- Issues related to manufacturability and viability of robotic genotypes Surrogate methods for fitness evaluations
Extended versions of the best submissions will be considered for a Special Issue of the Frontiers in Robotics and AI after a further refereeing process.
There is no attendance or registration fee for a limited number of places, for which authors of accepted submissions will get priority. We also have a number of student bursaries available, which will contribute towards the travel and accommodation costs of registered students. The deadline for submissions is Monday 19th September 2022 and submissions should be emailed, as a pdf, to andy.tyrrell@york.ac.uk with 'ARE workshop submission' in the Subject field of the email.
Submissions due:
Monday 19th September 2022
Invited speakers
Josh Bongard
University of Vermont
Barbara Webb
University of Edinburgh
Roderich Gross
University of Sheffield
Emma Hart
Edinburgh Napier University
Agoston Eiben
Vrije Universiteit Amsterdam
Sanaz Mostaghim
Otto von Guericke University
Andrew Philippides
University of Sussex
Phil Husbands
University of Sussex
Alan Winfield
University of the West of England
Organisers
Andy Tyrrell
University of York
Emma Hart
Edinburgh Napier University
Alan Winfield
University of the West of England
Jon Timmis
University of Sunderland
Agoston Eiben
Vrije Universiteit Amsterdam
Edgar Buchanan
University of York
Robert Woolley
University of York
![]()